
Cutting-edge robotic gripper designed for extreme heat environments
Adaptive High-Temperature Robotic Gripper with Casted Ceramic Insulator
For many industrial sectors in metal additive manufacturing, casting, and forging, the absence of adaptive and high-temperature-resistant robotic grippers has posed significant limitations in automating these processes. Conventional grippers lack the capacity to withstand extreme temperatures or accommodate varied shapes and sizes of objects, hindering automation in such demanding environments. Researchers at VCU have addressed this need by developing a robotic gripper equipped with a specialized casted ceramic insulator. Its ability to endure high temperatures while maintaining adaptability allows it to grasp diverse objects, enabling automation in processes that were previously inaccessible to robots. By offering resilience in extreme heat and adaptability to handle various objects, this invention presents a solution for industries seeking efficient automation in high-temperature settings.
The technology
At the invention’s central design lies a casted ceramic insulator, strategically engineered to withstand extreme heat while maintaining structural integrity. Complemented by an alloy steel finger and adapter fabricated using precise milling techniques, this gripper achieves a balance between strength and flexibility. The integration of an industrial thermocouple ensures active temperature monitoring, further enhancing its capabilities in handling objects within varying thermal conditions. Assembled onto the robot's end effector, this gripper utilizes its adaptive nature, leveraging the parallel design to adjust its width and securely grasp objects of different shapes and sizes. This innovative mechanism enables the gripper to navigate and operate effectively in demanding processes like metal additive manufacturing or casting, previously inaccessible due to the lack of adaptable, high-temperature-resistant robotic . (Fig. 1)
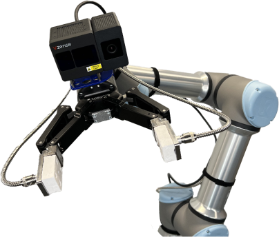

Fig. 1. (a) Robotic gripper fitted with a camera for remote control. (b) Gripper arm 3D diagram.